Roboty 6-osiowe uniwersalne

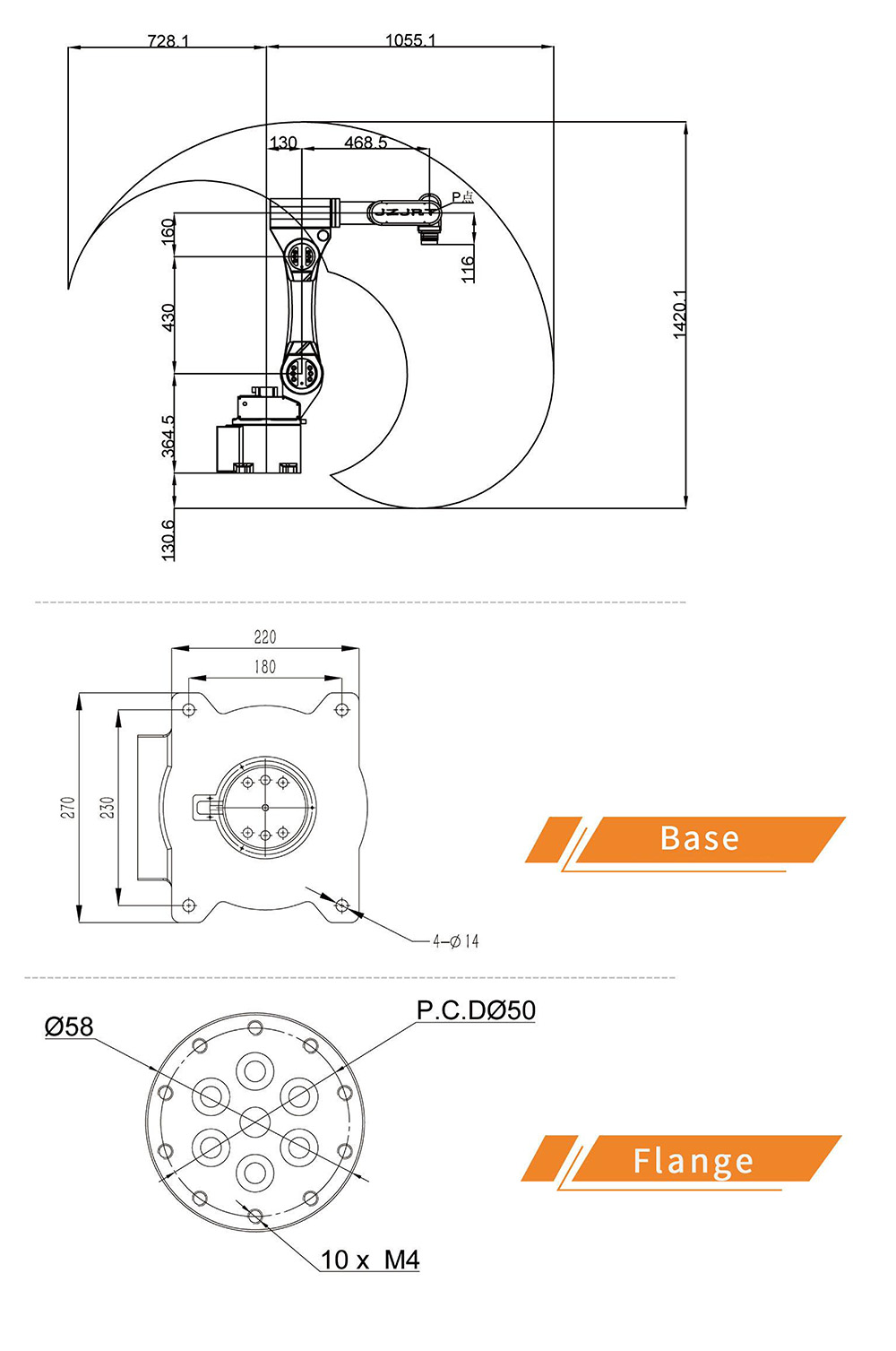
| Model | JZJ06A-100 | |
|---|---|---|
| Ilość osi | 6 | |
| Ładowność nominalna | 6 kg | |
| Zakresy ruchu osi w stopniach | ||
| 1 oś | ±140° | |
| 2 oś | -70° +60 | |
| 3 oś | -60° +90° | |
| 4 oś | ±180° | |
| 5 oś | ±100° | |
| 6 oś | ±360° | |
| Prędkości osi w stopniach na sekundę | ||
| 1 oś | 280 | |
| 2 oś | 280 | |
| 3 oś | 300 | |
| 4 oś | 460 | |
| 5 oś | 360 | |
| 6 oś | 570 | |
| Powtarzalność pozycjonowania | ±0.08mm | |
| Wysięg | 1055mm | |
| Masa ramienia | 72kg | |
| Moc zainstalowana | 1.5kVA | |

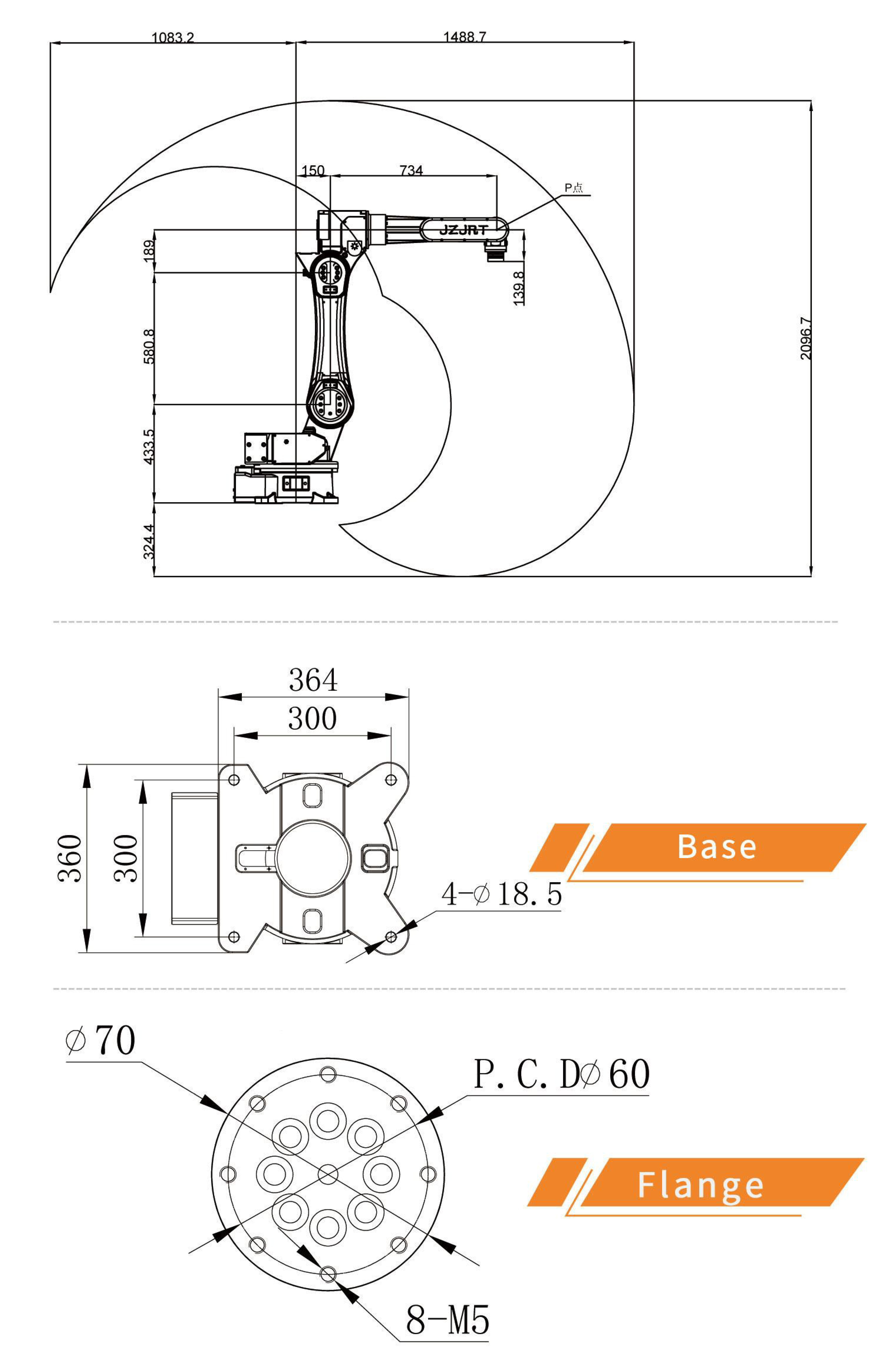
| Model | JZJ10A-160 | |
|---|---|---|
| Ilość osi | 6 | |
| Ładowność nominalna | 10 kg | |
| Zakresy ruchu osi w stopniach | ||
| 1 oś | ±140° | |
| 2 oś | -70° +60 | |
| 3 oś | -60° +90° | |
| 4 oś | ±180° | |
| 5 oś | -90° +115° | |
| 6 oś | ±360° | |
| Prędkości osi w stopniach na sekundę | ||
| 1 oś | 185 | |
| 2 oś | 185 | |
| 3 oś | 185 | |
| 4 oś | 320 | |
| 5 oś | 480 | |
| 6 oś | 600 | |
| Powtarzalność pozycjonowania | ±0.08mm | |
| Wysięg | 1488mm | |
| Masa ramienia | 176kg | |
| Moc zainstalowana | 2.5kVA | |

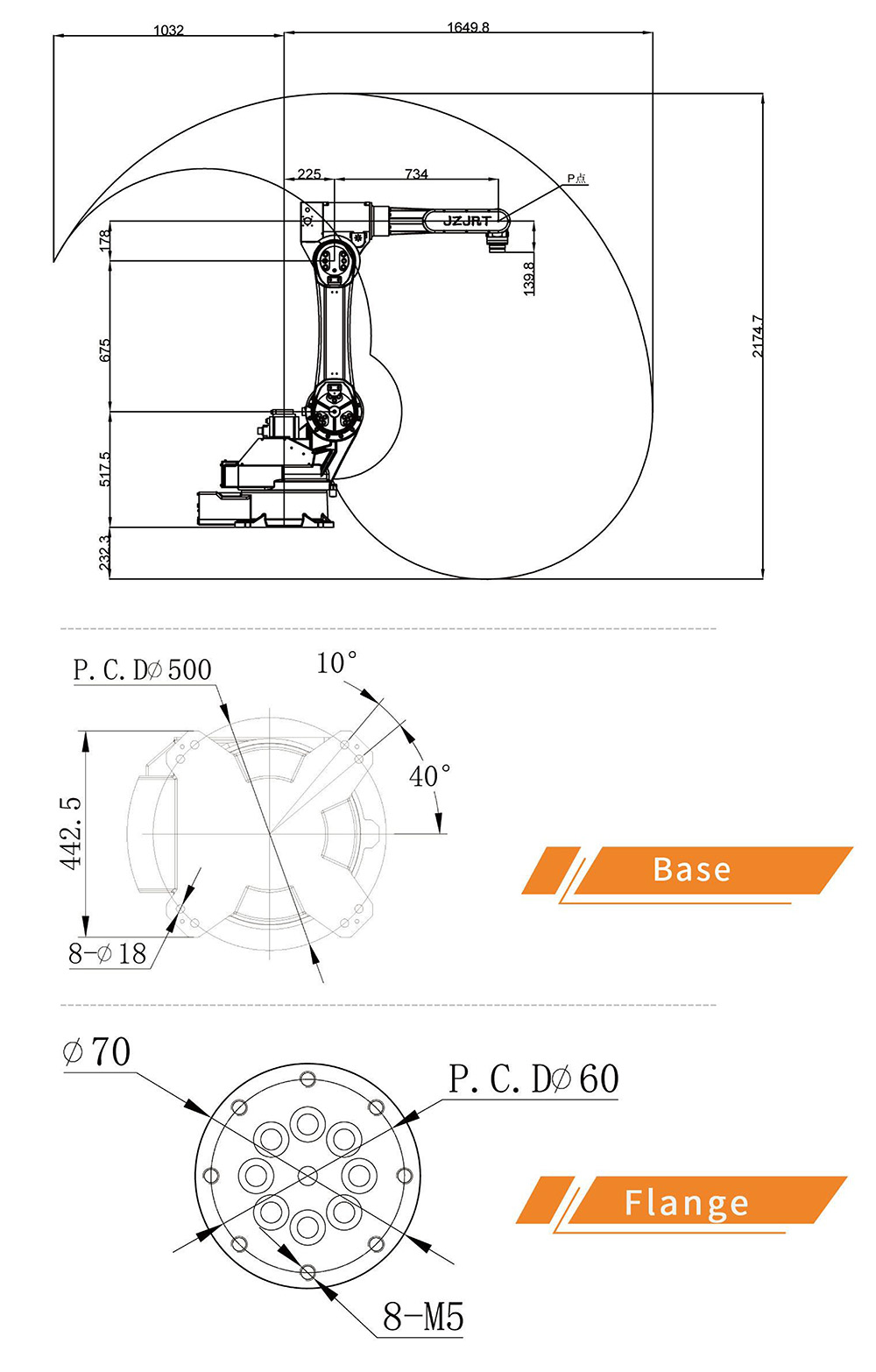
| Model | JZJ20A-180 | |
|---|---|---|
| Ilość osi | 6 | |
| Ładowność nominalna | 20 kg | |
| Zakresy ruchu osi w stopniach | ||
| 1 oś | ±145° | |
| 2 oś | -90° +60 | |
| 3 oś | ±80° | |
| 4 oś | ±180° | |
| 5 oś | ±110° | |
| 6 oś | ±360° | |
| Prędkości osi w stopniach na sekundę | ||
| 1 oś | 185 | |
| 2 oś | 185 | |
| 3 oś | 185 | |
| 4 oś | 320 | |
| 5 oś | 300 | |
| 6 oś | 310 | |
| Powtarzalność pozycjonowania | ±0.08mm | |
| Wysięg | 1649mm | |
| Masa ramienia | 310kg | |
| Moc zainstalowana | 4.5kVA | |

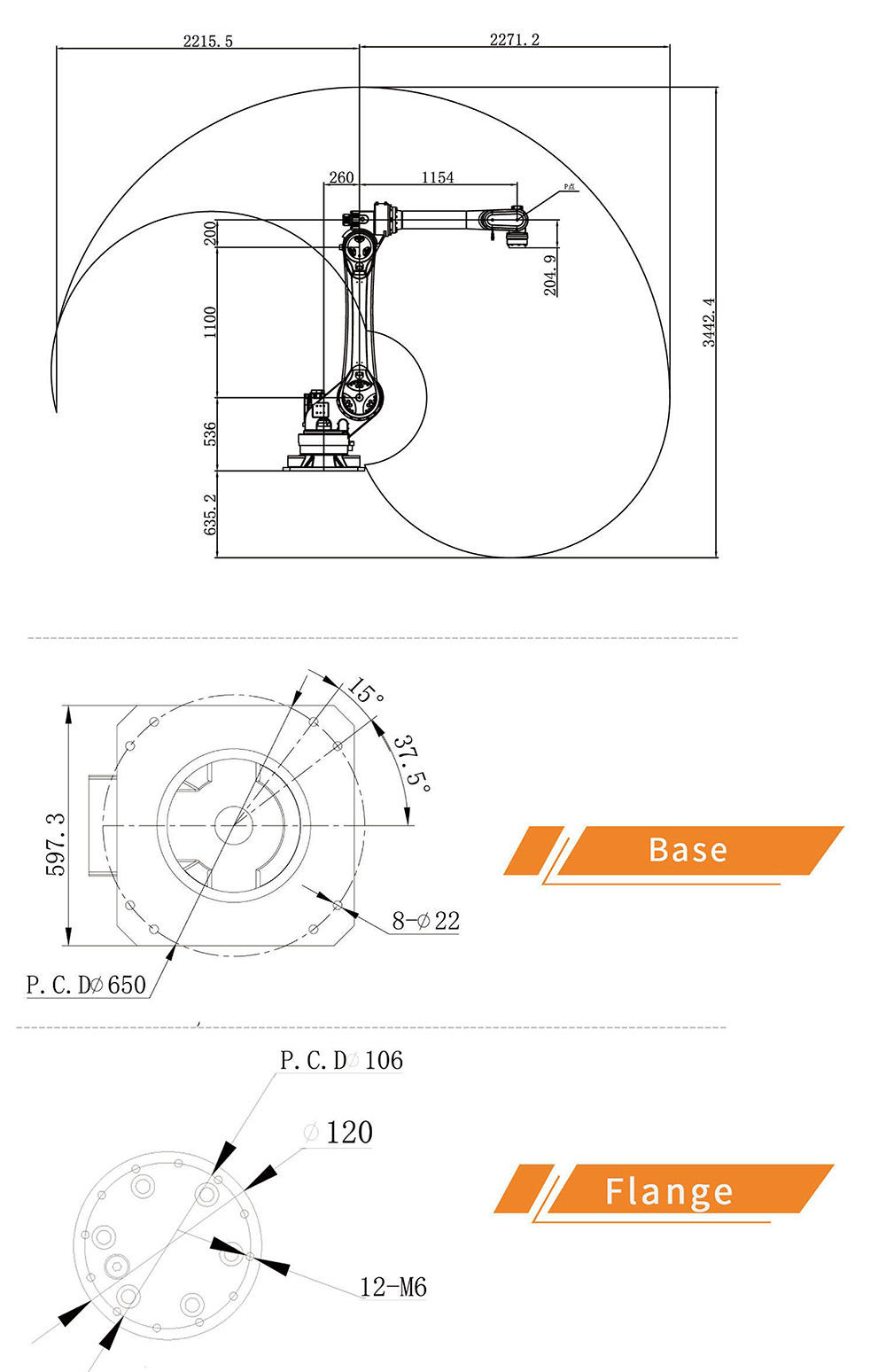
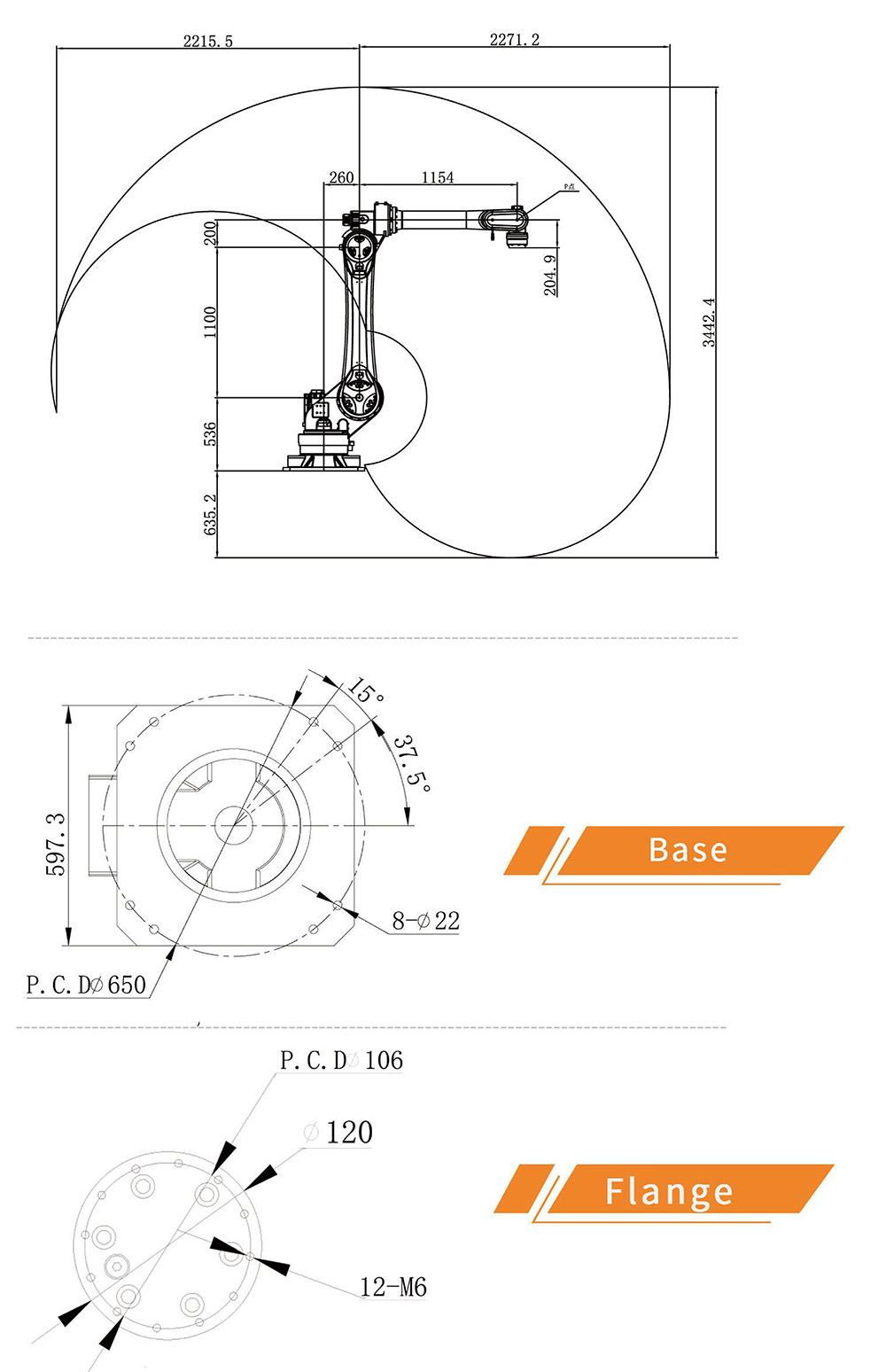
| Model | JZJ50A-270 | |
|---|---|---|
| Ilość osi | 6 | |
| Ładowność nominalna | 50 kg | |
| Zakresy ruchu osi w stopniach | ||
| 1 oś | ±165° | |
| 2 oś | -90° +80° | |
| 3 oś | -75° +105 | |
| 4 oś | ±180° | |
| 5 oś | ±90° | |
| 6 oś | ±360° | |
| Prędkości osi w stopniach na sekundę | ||
| 1 oś | 93 | |
| 2 oś | 93 | |
| 3 oś | 108 | |
| 4 oś | 137 | |
| 5 oś | 148 | |
| 6 oś | 233 | |
| Powtarzalność pozycjonowania | ±0.15mm | |
| Wysięg | 2271mm | |
| Masa ramienia | 655kg | |
| Moc zainstalowana | 8kVA | |

| Model | JZJ100A-270 | |
|---|---|---|
| Ilość osi | 6 | |
| Ładowność nominalna | 100 kg | |
| Zakresy ruchu osi w stopniach | ||
| 1 oś | ±165° | |
| 2 oś | -90° +80° | |
| 3 oś | -75° +105 | |
| 4 oś | ±180° | |
| 5 oś | ±90° | |
| 6 oś | ±360° | |
| Prędkości osi w stopniach na sekundę | ||
| 1 oś | 93 | |
| 2 oś | 70 | |
| 3 oś | 74 | |
| 4 oś | 137 | |
| 5 oś | 148 | |
| 6 oś | 233 | |
| Powtarzalność pozycjonowania | ±0.15mm | |
| Wysięg | 2271mm | |
| Masa ramienia | 655kg | |
| Moc zainstalowana | 8.5kVA | |

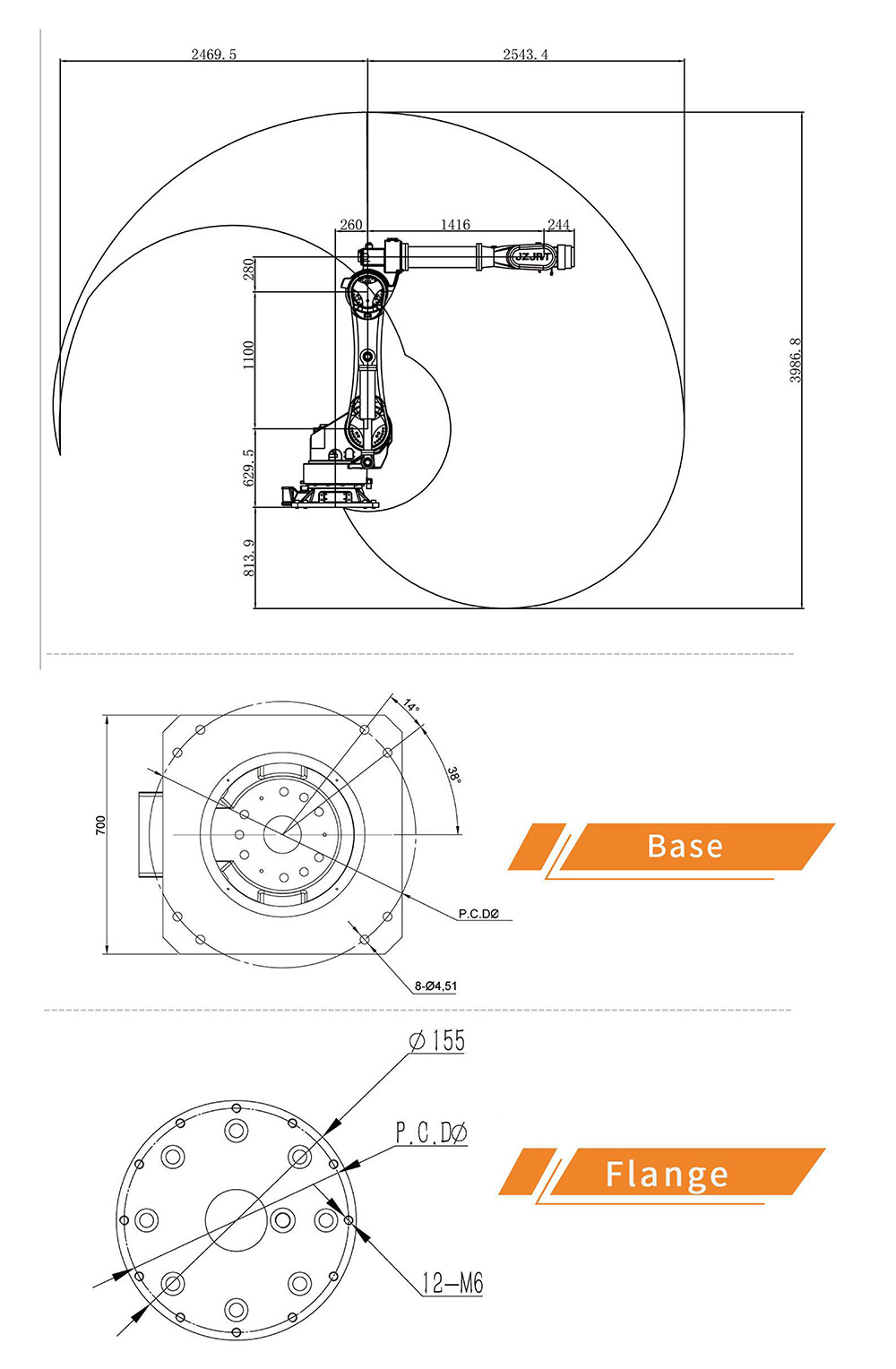
| Model | JZJ200A-270 | |
|---|---|---|
| Ilość osi | 6 | |
| Ładowność nominalna | 200 kg | |
| Zakresy ruchu osi w stopniach | ||
| 1 oś | ±165° | |
| 2 oś | -90° +80° | |
| 3 oś | -75° +105° | |
| 4 oś | ±180° | |
| 5 oś | -80° +93° | |
| 6 oś | ±360° | |
| Prędkości osi w stopniach na sekundę | ||
| 1 oś | 90 | |
| 2 oś | 70 | |
| 3 oś | 70 | |
| 4 oś | 118 | |
| 5 oś | 99 | |
| 6 oś | 222 | |
| Powtarzalność pozycjonowania | ±0.15mm | |
| Wysięg | 2543mm | |
| Masa ramienia | 920kg | |
| Moc zainstalowana | 13kVA | |

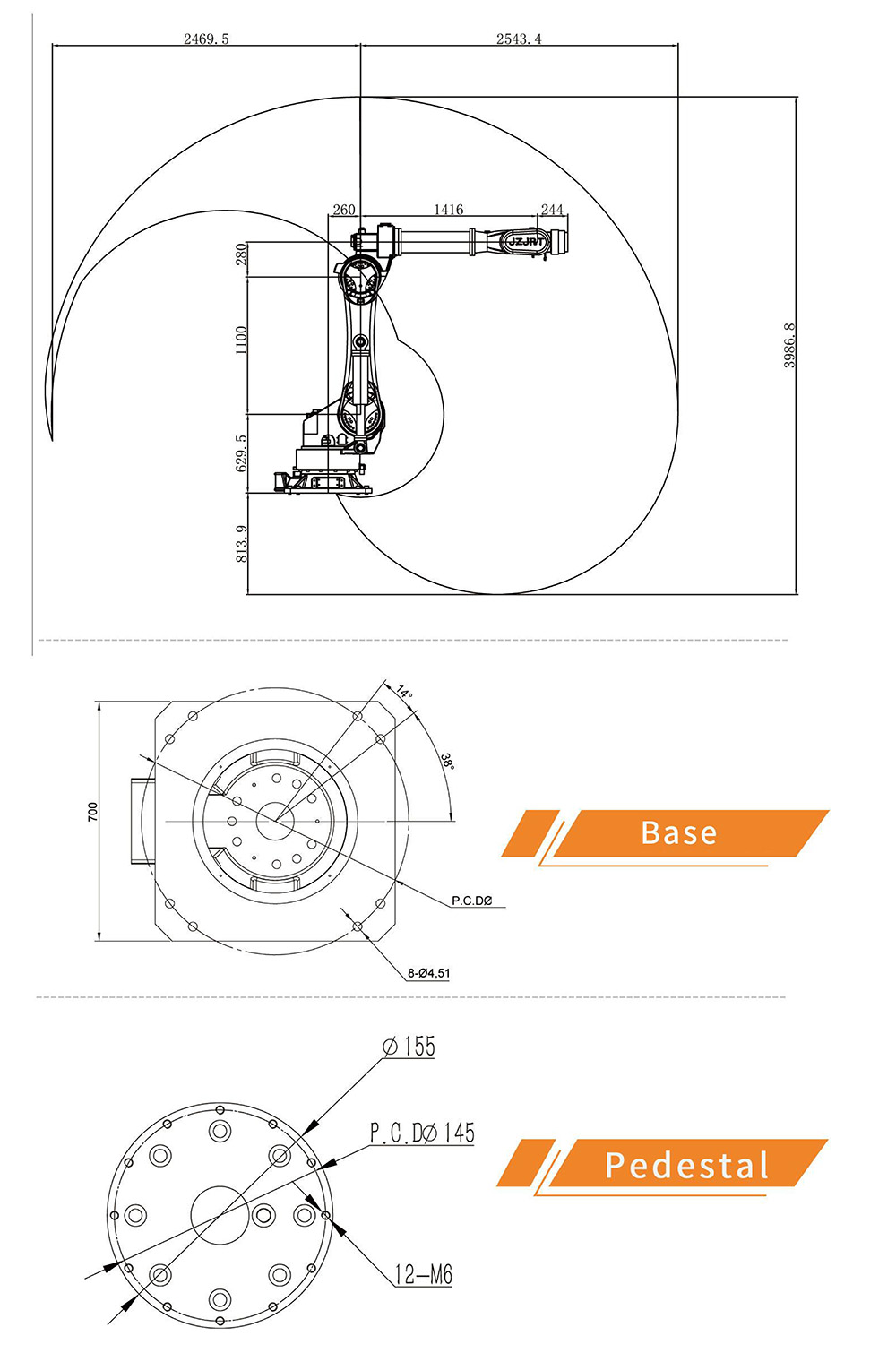
| Model | JZJ200C-270 | |
|---|---|---|
| Typ | robot zgrzewalniczy | |
| Ilość osi | 6 | |
| Ładowność nominalna | 200 kg | |
| Zakresy ruchu osi w stopniach | ||
| 1 oś | ±165° | |
| 2 oś | -90° +80° | |
| 3 oś | -75° +105° | |
| 4 oś | ±180° | |
| 5 oś | -80° +93° | |
| 6 oś | ±360° | |
| Prędkości osi w stopniach na sekundę | ||
| 1 oś | 90 | |
| 2 oś | 70 | |
| 3 oś | 70 | |
| 4 oś | 118 | |
| 5 oś | 99 | |
| 6 oś | 222 | |
| Powtarzalność pozycjonowania | ±0.15mm | |
| Wysięg | 2543mm | |
| Masa ramienia | 920kg | |
| Moc zainstalowana | 13kVA | |

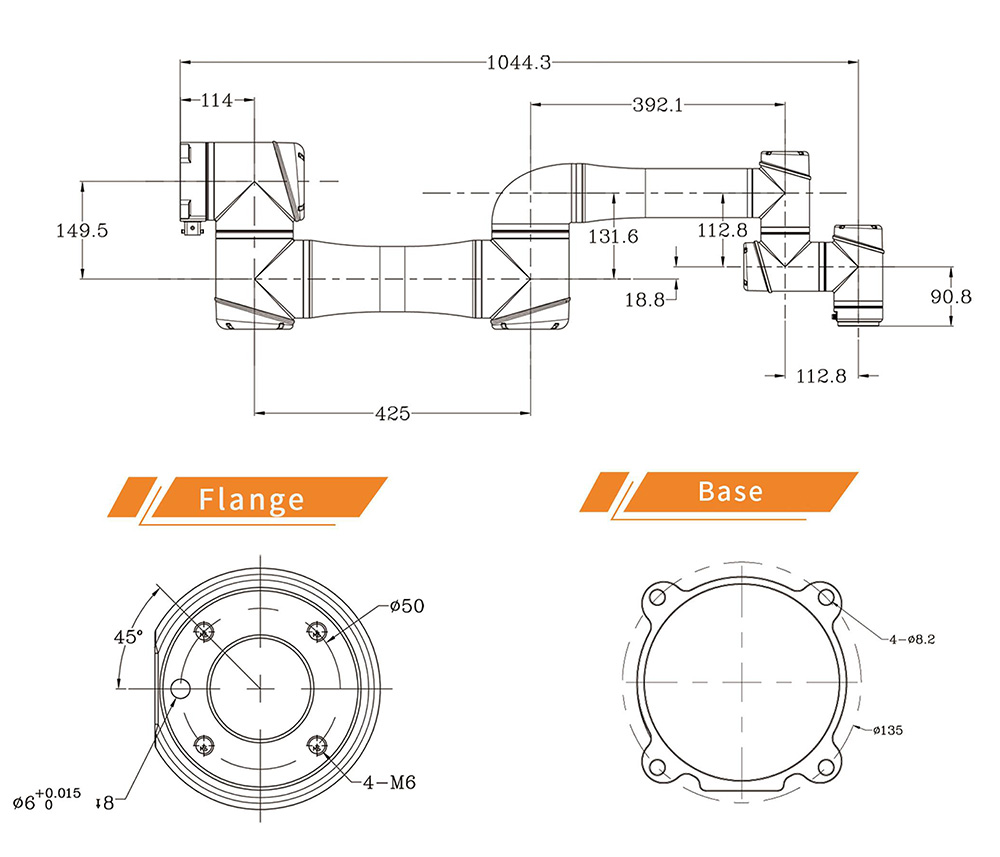
| Model | JZJ05X-092 | |
|---|---|---|
| Typ | robot kolaboracyjny (cobot) |
|
| Ilość osi | 6 | |
| Ładowność nominalna | 5 kg | |
| Zakresy ruchu osi w stopniach | ||
| 1 oś | ±170° | |
| 2 oś | ±100° | |
| 3 oś | -60° +240° | |
| 4 oś | ±170° | |
| 5 oś | ±100° | |
| 6 oś | ±350° | |
| Prędkości osi w stopniach na sekundę | ||
| 1 oś | 81 | |
| 2 oś | 81 | |
| 3 oś | 81 | |
| 4 oś | 135 | |
| 5 oś | 135 | |
| 6 oś | 135 | |
| Powtarzalność pozycjonowania | ±0.03mm | |
| Wysięg | 920mm | |
| Masa ramienia | 19.5kg | |
| Moc zainstalowana | 1.5kVA | |
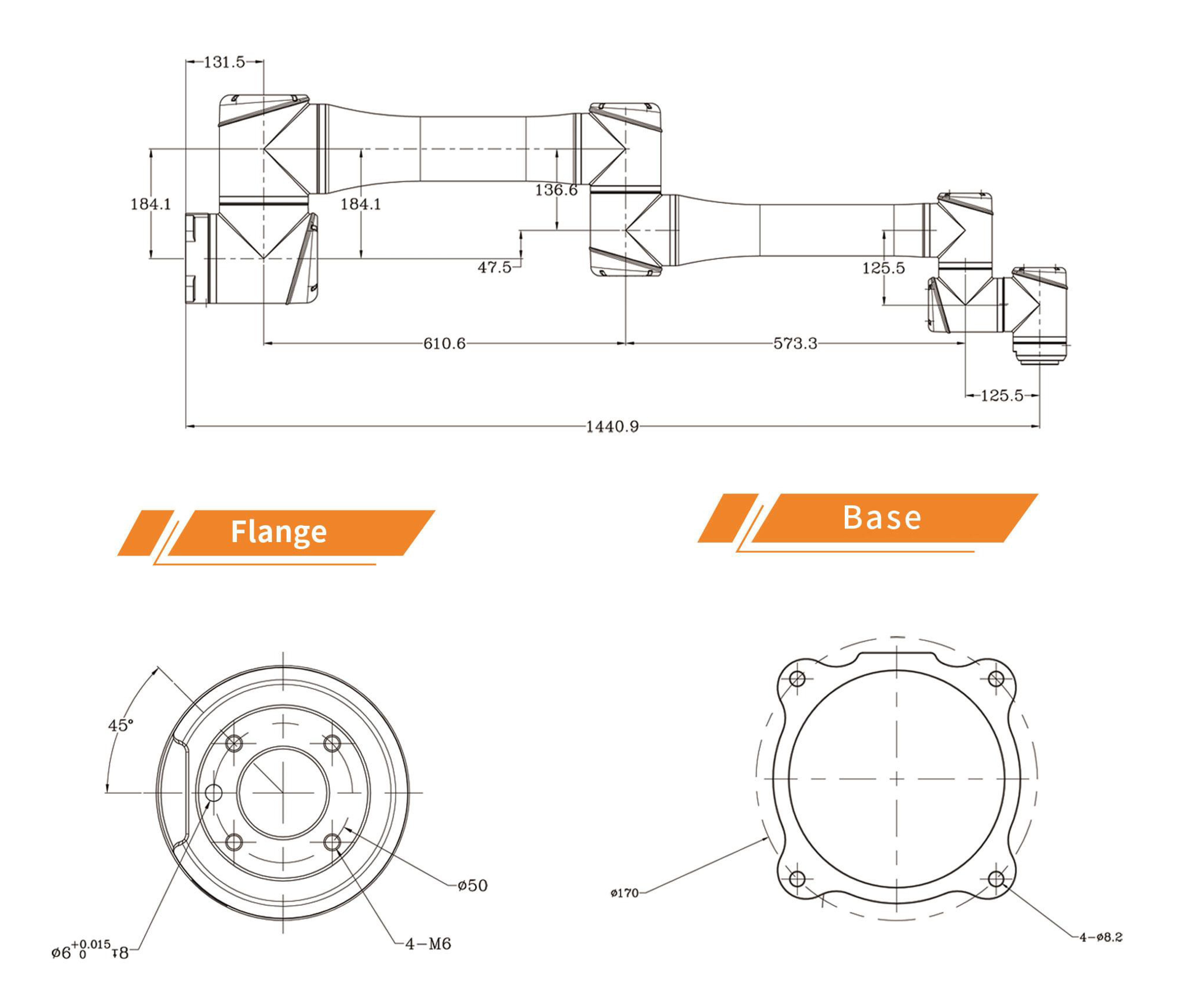
| Model | JZJ10X-130 | |
|---|---|---|
| Typ | robot kolaboracyjny (cobot) |
|
| Ilość osi | 6 | |
| Ładowność nominalna | 10 kg | |
| Zakresy ruchu osi w stopniach | ||
| 1 oś | ±170° | |
| 2 oś | ±100° | |
| 3 oś | -60° +240° | |
| 4 oś | ±170° | |
| 5 oś | ±100° | |
| 6 oś | ±350° | |
| Prędkości osi w stopniach na sekundę | ||
| 1 oś | 81 | |
| 2 oś | 81 | |
| 3 oś | 121 | |
| 4 oś | 182 | |
| 5 oś | 182 | |
| 6 oś | 182 | |
| Powtarzalność pozycjonowania | ±0.03mm | |
| Wysięg | 1300mm | |
| Masa ramienia | 32kg | |
| Moc zainstalowana | 2kVA | |